JumpRoACH, Your Own Robo Insect With A Brand New Jumping Mechanism

The recent craze in Robotic Bugs have increasingly gone viral and with modern technologies available near reach, tech maniacs are engaging themselves in building more sophisticated tools as per requirement, following the demands. Aerial vehicles, commonly articulated as Drones have proven to be an easy target when it to comes to regular experiments. Even large scale robotics manufacturing and service industries are also growing, not only depending on the official product demands rather the brewing interest caught in personal buyers.
The JumpRoACH
Recently, the world has noticed, the best universities/organizations are joining hands to mimic animals or insects’ behavior which they have incorporated in circuits to fabricate the objective. Along the way, they are hitting new milestones, in terms of quality testing, fabrication, in fact innovating a completely new way to approach a problem. Just a week ago; students from Harvard school envisioned a Robobee which jumps and sticks to natural as well as artificial objects, just like a bee and in the process, saves some energy. Most of them use a spring mechanism coupled with a latch system which helps it to go up and come back down in a timely, pre-designed manner with almost no control for real-time upgrades.
As a potential replacement for such designs, a research group from the Seoul National University, South Korea in collaboration with a team from UC Berkley has come up with a completely new hopping mechanism that could be integrated in small systems as well as large tech-heavy systems with maintaining the same basic procedure. Like #-Link-Snipped-#, the latest JumpRoACH can also saves its energy, resting in a particular position and jumps, while embedded on any modified structure. In this case, for prototype design scientists put the material on a hexapedal crawler (having similarity to a beetle) which only weighs 60 g but could jump 1.6 meter.
Highlighting its specifications; the artificial fly has a leg-like structure clipped with two flexible knees. The total leg portion creates a diamond shaped structure having similar working techniques as knees. The joints are coalesced with 8 latex made wires which store energy if it is under compression. Also, the process takes help of a small synchronized system comprising a wire, a pulley, a DC motor and a gear jargon which as in total, works as a control room.
The designed instrument is self-sufficient. When it is not attached with anything, it can jump to a height of 3 meter whereas if it’s put under a shell, it makes it up to (1.1 – 1.6) meter. There is no such gliding mechanism incorporated, but in future, it could be upgraded to a flying machine with tiny wings of its own. The complete research has been published in ICRA 2016 conference held in Stockholm, Sweden.
Watch JumpRoAch in Action:
Source: #-Link-Snipped-#
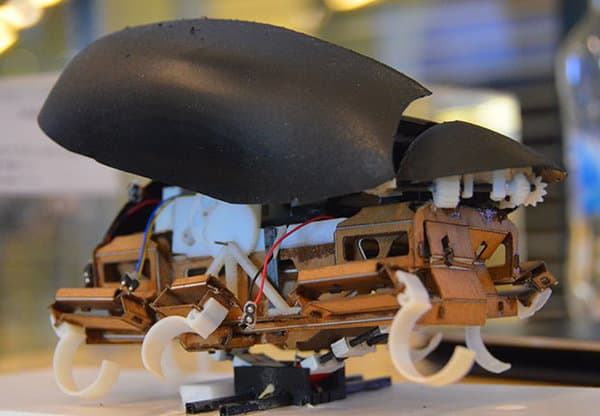
The JumpRoACH
As a potential replacement for such designs, a research group from the Seoul National University, South Korea in collaboration with a team from UC Berkley has come up with a completely new hopping mechanism that could be integrated in small systems as well as large tech-heavy systems with maintaining the same basic procedure. Like #-Link-Snipped-#, the latest JumpRoACH can also saves its energy, resting in a particular position and jumps, while embedded on any modified structure. In this case, for prototype design scientists put the material on a hexapedal crawler (having similarity to a beetle) which only weighs 60 g but could jump 1.6 meter.
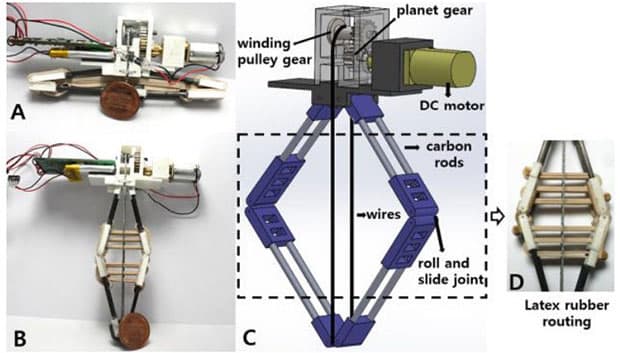
JumpRoACH mechanism
Highlighting its specifications; the artificial fly has a leg-like structure clipped with two flexible knees. The total leg portion creates a diamond shaped structure having similar working techniques as knees. The joints are coalesced with 8 latex made wires which store energy if it is under compression. Also, the process takes help of a small synchronized system comprising a wire, a pulley, a DC motor and a gear jargon which as in total, works as a control room.
The designed instrument is self-sufficient. When it is not attached with anything, it can jump to a height of 3 meter whereas if it’s put under a shell, it makes it up to (1.1 – 1.6) meter. There is no such gliding mechanism incorporated, but in future, it could be upgraded to a flying machine with tiny wings of its own. The complete research has been published in ICRA 2016 conference held in Stockholm, Sweden.
Watch JumpRoAch in Action:
Source: #-Link-Snipped-#
0