
Flapping Bot H2Bird Launched From Legged MilliRobot VelociRoACH
A team of researchers from UC Berkeley have come up with a combo of a legged crawler and a flying bot to develop a team capable of exploring rough terrain using multiple methods of locomotion. Robots inspired from nature are fast becoming popular owing to their many applications in the fields of medicine, biology as well as emergency services. In nature, animals are found to have many sensing adaptations and a robust system of locomotion that suits the environment around them. Taking inspire from these, particularly, the more agile, smaller animals, researchers can work upon light-weight, inexpensive robotic systems (millirobots) that can be mass produced. These milli-bots have serious advantages such as portability, however are limited in terms of processing power, sensors or battery life because of their small size. To counter this, generally a swarm of robots is used to traverse more complex environments.
If a legged robot is a great idea for uneven terrain, they also suffer from difficulty in traversing tall obstacles. A winged flapping millirobot is what comes to mind to solve this issue. However, millirobotic fliers are impractical for longer flight times because of battery life constraints. Therefore, the team at UC Berkeley thought of creating a combo of legged crawlers and flapping-winged fliers via multimodal robots. In a recent paper published by the team, they experimented with transporting and launching a flapping-winged robot, the H2Bird with a legged millirobot, the VelociRoACH.
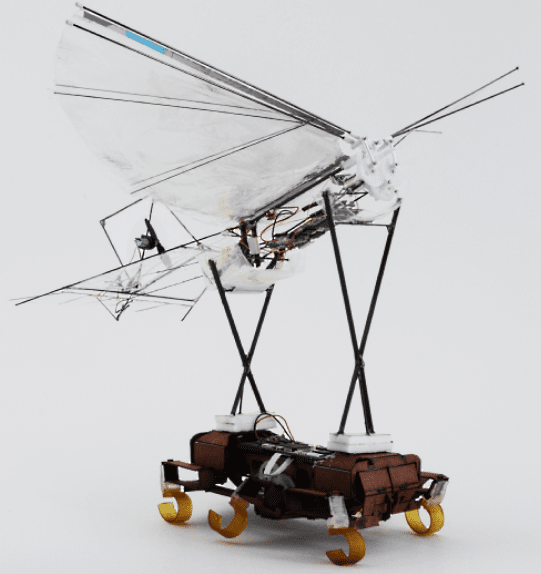
The H2Bird bot is designed for flight but isn't capable of taking off from the ground because its wings cannot provide enough thrust to counter its ground contact drag and weight. By calculating the conditions needed to takeoff, the team came up with a launch mechanism that can be mounted on top of VelociRoACH, a 32 gram hexapedal millirobot. They also calculated the energy costs needed for H2Bird's velocity & pitch angle for its takeoff onboard its partner & found out the potential effects of such a set up on the gait and stability of VelociRoACH.
Take a look at a demonstration video from the team -
The team further intends to experiment with the cooperative behaviors of millirobots to determine the ideal conditions for launch without any human intervention. What are your thoughts about such a robotic cooperative system? Share with us in comments below.
Source: #-Link-Snipped-#