A very abstract problem about angle,centre,movement and space.
@aruwin-WQ7eeu
•
Oct 22, 2024
Oct 22, 2024
1.0K
I am in my first year of degree in electrical information engineering and just started my university life for 2 months now.Let me just say that I am fresh from high school and still have no experience of real engineering projects or whatsoever.I am having trouble finding a solution to a problem that 2 researchers gave me and I have to present the solution on this coming monday.so here is the MAIN question.My BIG problem with this is that there absolutely no measurements given.The diagram is not drawn according to scale and it's just too abstract and not specific.
![[IMG]](proxy.php?image=http%3A%2F%2Fi96.photobucket.com%2Falbums%2Fl164%2FAruwin_2006%2FIMG_0456-1.jpg&hash=144df87ec56e9f5a99ba17ac22125e21)
Can the arm(the one with 3 fingers)touch all points throughout the whole space?pplease prove your answer by including proposition,hypothesis,theorem,formulae,etc.
Before proving the MAIN question,first solve these problems as these can lead to proving the MAIN question.
1.It's the same thing but first we think simple.Think about a circle.if the radius is 2,and the length of the arms between the node(think of it as a centre) is 1,how can you prove that it is able to touch all points in the circle?
![[IMG]](proxy.php?image=http%3A%2F%2Fi96.photobucket.com%2Falbums%2Fl164%2FAruwin_2006%2FIMG_0457.jpg&hash=46d1ed767cd4316913c59e0cdf3172c3)
My teacher only gives me one example of stating a prove which is as written in the diagram,the arm won't move out of the circle as it always moves at a constant distance and therefore it is able to touch the points shown in the diagram(including downwards movement).
2.But what if we were to touch a random point?how do we determine the angle needed to rotate the arm so that it touches a certain point as shown in figure 2 below?one of the way is by changing the position of the node(the centre of the arm)but how much does it need to be repositioned?
![[IMG]](proxy.php?image=http%3A%2F%2Fi96.photobucket.com%2Falbums%2Fl164%2FAruwin_2006%2FIMG_0458.jpg&hash=6f7e7d1519add7d22222f3811dc89c88)
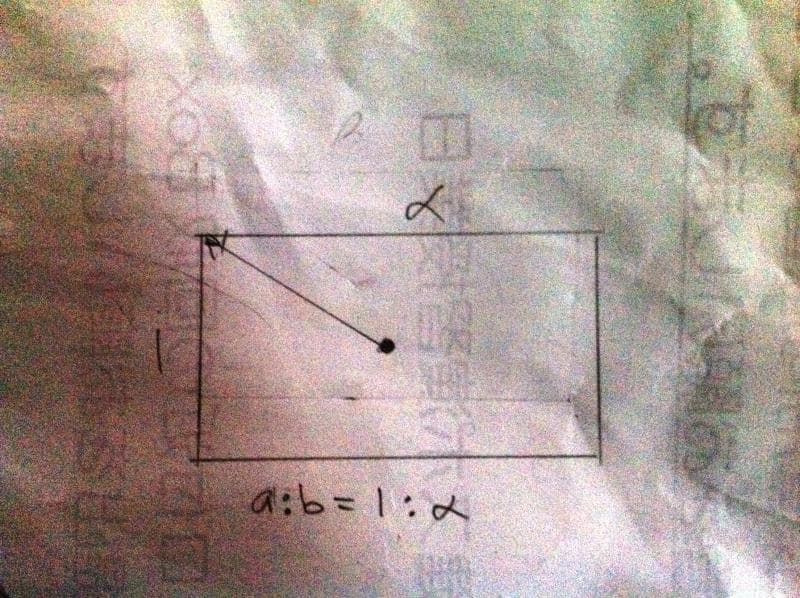
3.After solving the circle,think of square.Can the arm touches all points in the square?What is the prove?
![[IMG]](proxy.php?image=http%3A%2F%2Fi96.photobucket.com%2Falbums%2Fl164%2FAruwin_2006%2FIMG_0459-1.jpg&hash=133f3f9f15040b02a8a3fb3522a02e68)
4.After solving the square,solve a triangle.
![[IMG]](proxy.php?image=http%3A%2F%2Fi96.photobucket.com%2Falbums%2Fl164%2FAruwin_2006%2FIMG_0462-1.jpg&hash=7d75284180b8221baf95535b429e620d)
So this is what the 2 researches told me to do.I really need a complete solution to proving wether the arm stated in the MAIN question can or cannot touch all points in the space given.My hypothesis is that the arm can touch all the points but I do not know how to prove it as the 2 researches reject my logical explanation.They want me to prove this mathematically.
Can the arm(the one with 3 fingers)touch all points throughout the whole space?pplease prove your answer by including proposition,hypothesis,theorem,formulae,etc.
Before proving the MAIN question,first solve these problems as these can lead to proving the MAIN question.
1.It's the same thing but first we think simple.Think about a circle.if the radius is 2,and the length of the arms between the node(think of it as a centre) is 1,how can you prove that it is able to touch all points in the circle?
My teacher only gives me one example of stating a prove which is as written in the diagram,the arm won't move out of the circle as it always moves at a constant distance and therefore it is able to touch the points shown in the diagram(including downwards movement).
2.But what if we were to touch a random point?how do we determine the angle needed to rotate the arm so that it touches a certain point as shown in figure 2 below?one of the way is by changing the position of the node(the centre of the arm)but how much does it need to be repositioned?
3.After solving the circle,think of square.Can the arm touches all points in the square?What is the prove?
4.After solving the square,solve a triangle.
So this is what the 2 researches told me to do.I really need a complete solution to proving wether the arm stated in the MAIN question can or cannot touch all points in the space given.My hypothesis is that the arm can touch all the points but I do not know how to prove it as the 2 researches reject my logical explanation.They want me to prove this mathematically.
![[IMG]](proxy.php?image=http%3A%2F%2Fi54.tinypic.com%2F989ez9.jpg&hash=96f90a2f04c365768ad99014bf2dbb96) Apply the same analogy to circle.
Apply the same analogy to circle. ![[IMG]](proxy.php?image=http%3A%2F%2Fi54.tinypic.com%2F2bxsea.jpg&hash=746ea6cff1fdf98e7d1d4071db1b5868)
![[IMG]](proxy.php?image=http%3A%2F%2Fi53.tinypic.com%2F2d0kz01.jpg&hash=89b13fc5d09f65f7554e5309b9ad2fc8)
![[IMG]](proxy.php?image=http%3A%2F%2Fi51.tinypic.com%2F2q15qw5.jpg&hash=6fa25574aa95ea5c09539187d9d2433f)
![[IMG]](proxy.php?image=http%3A%2F%2Fi53.tinypic.com%2Fs1u74k.jpg&hash=9e032815d09793649b310565dfd718fa)
![[IMG]](proxy.php?image=http%3A%2F%2Fi53.tinypic.com%2F2jg2o3k.jpg&hash=b056f1433e57c7b3657f1f5f8a29524b)