
A Shimmy Robot, Moves Like A Centipede, Discloses Underlying Concepts Of Intelligent Motor Functions
@debasmita-9A90wv
•
Oct 27, 2024
Oct 27, 2024
2.0K
Do you keep a distance from the arthropods? Or do you keep them inside your old tiffin box to observe their behavior? Whether you like it or not, scientists from Kyoto University have found a solid theory out of those Centipedes, the arthropods that belong to a class Chilopoda of the subphylum Myriapoda. Following the unique locomotion style of Centipedes, they have developed a robotic creature that knowingly changes its disadvantages to a surprising advantage.
The researchers instigated us to think how a Centipede runs with its never-failing skills over terrain fields and obstacles. Surely, this is the least expected question but it is what made them the center of today’s CE weekend news. The aforementioned question was still an unsolved mystery until very recently when the researchers planned to superimpose simulation over robotics to map the nature and to predict a tool that unfolds the scrambled speculations.
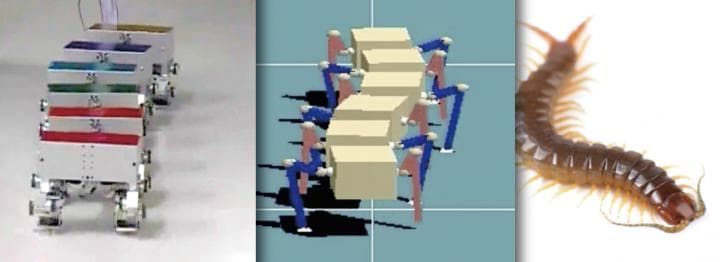
Structure of Centipede and Robot
Interestingly, we have all seen how the ripple patterns are formed over their legs when a centipede moves. And these multilegged movements is not at all a stable one rather an increment of the intrinsic degree of freedom only complicates the control while moving on a plan. However, this also has some peculiar benefits like it could tolerate malfunction of a single leg and then modifies equally the rest to stabilize its motion.
The lead scientist and first author of this paper Shinya Aoi has explained that when a Centipede is running on the ground, many of the legs are in contact with the base to propel the body in against of the gravitational pull. At that time, many legs are glued to the ground which require dexterity to balance the body stability. And surprisingly, to do that they inherently incorporated an instability which is the responsible notion to produce an undulating movement.
According to the source, a mathematical model expressed to speak for Centipede’s locomotion nature has revealed that a straight walk rather becomes unstable and naturally, the undulations are born from a supercritical Hopf bifurcation that evolves from changing the locomotion speed and body axis stability. At first, the motion is explained with the help of simulation and later on it was introduced over a robot that was specifically built to mimic the pattern.
However, Aoi and the team would like to explore more as this is one of those unique experiments where applications are realized to empower the theory. The lead author expressed, their experiment would further explore the intelligent motor functions of animals and will provide more importance on the nearly unexplored subject – mechanics of animal locomotion. The study has been recently published in the journal of Scientific Reports.
Source: #-Link-Snipped-#
The researchers instigated us to think how a Centipede runs with its never-failing skills over terrain fields and obstacles. Surely, this is the least expected question but it is what made them the center of today’s CE weekend news. The aforementioned question was still an unsolved mystery until very recently when the researchers planned to superimpose simulation over robotics to map the nature and to predict a tool that unfolds the scrambled speculations.
Structure of Centipede and Robot
Interestingly, we have all seen how the ripple patterns are formed over their legs when a centipede moves. And these multilegged movements is not at all a stable one rather an increment of the intrinsic degree of freedom only complicates the control while moving on a plan. However, this also has some peculiar benefits like it could tolerate malfunction of a single leg and then modifies equally the rest to stabilize its motion.
The lead scientist and first author of this paper Shinya Aoi has explained that when a Centipede is running on the ground, many of the legs are in contact with the base to propel the body in against of the gravitational pull. At that time, many legs are glued to the ground which require dexterity to balance the body stability. And surprisingly, to do that they inherently incorporated an instability which is the responsible notion to produce an undulating movement.
According to the source, a mathematical model expressed to speak for Centipede’s locomotion nature has revealed that a straight walk rather becomes unstable and naturally, the undulations are born from a supercritical Hopf bifurcation that evolves from changing the locomotion speed and body axis stability. At first, the motion is explained with the help of simulation and later on it was introduced over a robot that was specifically built to mimic the pattern.
However, Aoi and the team would like to explore more as this is one of those unique experiments where applications are realized to empower the theory. The lead author expressed, their experiment would further explore the intelligent motor functions of animals and will provide more importance on the nearly unexplored subject – mechanics of animal locomotion. The study has been recently published in the journal of Scientific Reports.
Source: #-Link-Snipped-#