Stanford engineers build Gecko-inspired adhesive bot that can remove debris from outer space

That day is not so far when mankind will also dominate the frontiers of space. With every successful space missions, we have conquered certain regions of our realm in terms of information and knowledge. However, all these knowledge have been achieved in exchange for a large sum of investments and polluting the space itself. Yes, we are now entering the topic of man-made debris which is at present floating in space with moving speeds of up to 17,500 miles per hour.
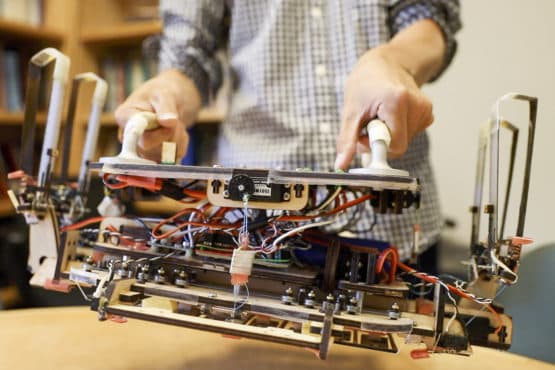
Gecko- Inspired Adhesive Robot made by Stanford Researchers
Hao Jiang, a graduate student of Stanford Cutkosky Lab, has proposed an automated robotic gripper that will help to collect the debris in near future. The robotic gripper has been successfully tested in the environment with G-forces varying from 2 to 0G and has also been tested on the ISS (International Space Station) as well. The robotic gripper uses an adhesive to stick to the debris which is inspired by how Gecko sticks to the surfaces of the walls. Gecko has microscopic flaps in their feet which create a Van der Waals force between their feet and the surface they want to stick to.
Gecko’s flaps are very well defined with a dimension of about 200 nanometers. The gripper robot, on the other hand, uses adhesive flaps which are only 40 micrometers in dimension. These difference definitely make Gecko a better candidate than the robotic gripper, however, you all know the reason why we can’t use Gecko to collect space debris.
The gripper robot has been tested in both Cutkosky Lab and in JPL Laboratory where its efficiency was tested. According to the researchers, the robot has successfully succeeded in 2D zero gravity simulation environment where it moved large robots on a giant air hockey table. The effectiveness can be understood by the fact that a small portion of that adhesive can carry a robot of weight varying up to 300 kg.
After such extensive testing, the main hurdle lies in making the robot ready for outer space missions. The robot is made up of laser cut plywood and rubber polymers which on the harsh outer space environments won’t be useful. Thus, Hao Jiang and his team are trying hard to make their robot ready for the outer space missions. Their research has recently been published in Journal #-Link-Snipped-# with title#-Link-Snipped-# and has been funded by NASA, National Science Foundation, and Samsung Scholarship.
Watch this video to know more about this Gecko-Inspired Adhesive Bot -
Source – <a href="https://news.stanford.edu/2017/06/28/engineers-design-robotic-gripper-cleaning-space-debris/" target="_blank" rel="nofollow noopener noreferrer">news.stanford.edu</a> | #-Link-Snipped-#
According to a report, around 500,000 pieces of human debris are floating around the space and their lethal index can be described by the fact that their collision with a satellite might bring down our whole communication system. Increasing count of such debris with increasing space exploration missions have attracted the minds of many researchers and Stanford researchers might have what is required to tackle this problem in future.Gecko- Inspired Adhesive Robot made by Stanford Researchers
Gecko’s flaps are very well defined with a dimension of about 200 nanometers. The gripper robot, on the other hand, uses adhesive flaps which are only 40 micrometers in dimension. These difference definitely make Gecko a better candidate than the robotic gripper, however, you all know the reason why we can’t use Gecko to collect space debris.
The gripper robot has been tested in both Cutkosky Lab and in JPL Laboratory where its efficiency was tested. According to the researchers, the robot has successfully succeeded in 2D zero gravity simulation environment where it moved large robots on a giant air hockey table. The effectiveness can be understood by the fact that a small portion of that adhesive can carry a robot of weight varying up to 300 kg.
After such extensive testing, the main hurdle lies in making the robot ready for outer space missions. The robot is made up of laser cut plywood and rubber polymers which on the harsh outer space environments won’t be useful. Thus, Hao Jiang and his team are trying hard to make their robot ready for the outer space missions. Their research has recently been published in Journal #-Link-Snipped-# with title#-Link-Snipped-# and has been funded by NASA, National Science Foundation, and Samsung Scholarship.
Watch this video to know more about this Gecko-Inspired Adhesive Bot -
Source – <a href="https://news.stanford.edu/2017/06/28/engineers-design-robotic-gripper-cleaning-space-debris/" target="_blank" rel="nofollow noopener noreferrer">news.stanford.edu</a> | #-Link-Snipped-#
0