Stanford's Latest Drone SCAMP Can Fly And Climb Walls Like Spiderman
Morgan Pope, a Stanford PhD student has developed a new breed of Spiderman-like drones at Stanford's Biomimetics and Dexterous Manipulation Lab. He, along with other Stanford University PhD students and Prof. Vijay Kumar have developed new flying robots named SCAMP (an abbreviation for Stanford Climbing and Aerial Manoeuvring Platform), which can land and <a href="https://www.crazyengineers.com/threads/disney-researchers-testing-vertigo-a-robot-that-climbs-walls.88719">Disney Researchers Testing 'VertiGo' - A Robot That Climbs Walls</a>. This brings forth an important application of flying robots and autonomous navigation- rescue operations.
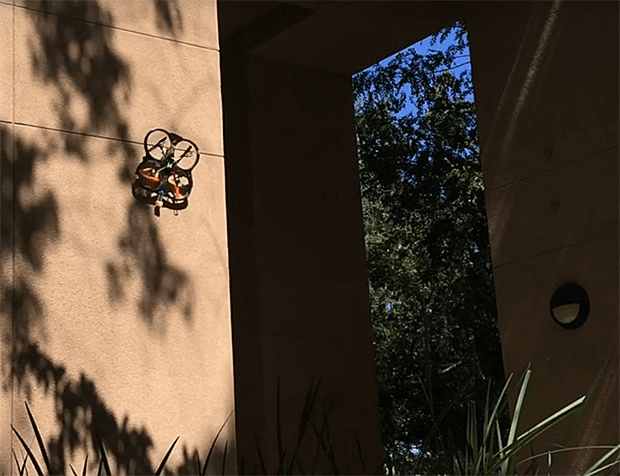
The early inspiration to develop such a drone, specifically a quadcopter came upon pondering and scrutinising the fact that drones have a very limited battery life, which reduces the flight and overall usage time, making it less applicable to practical situations. The newly developed drone can, however, roost on any wall or ceiling of any inclination and height, instead of simply hovering around. This also helps the robot capture more stable pictures and videos of the sight, than a hovering drone. Moreover, it aids control of the drone in a rainy or windy situation, where an ordinary quadcopter would simply fail.
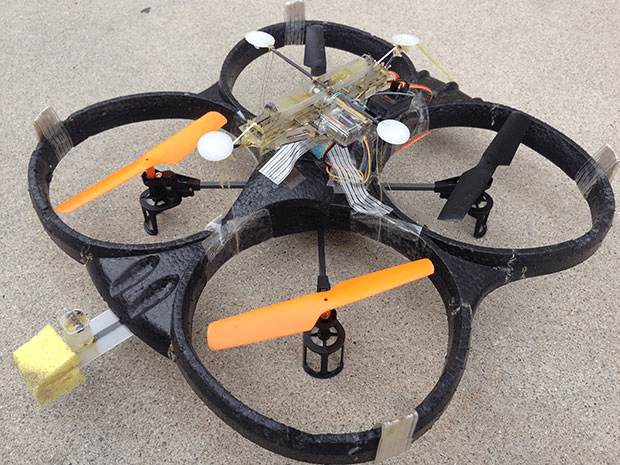
In order to perch on a wall, the robot uses what they call 'Microspines' which are hardened steel spikes on a special suspension, which are dragged along the same surface but in opposite direction to make a grip over an inclined surface. This is known as the opposed grip strategy. The spine gets attached to tiny microscopic bumps on a surface due to friction. This helps the quadcopter to perch not only on a wall, but also on a ceiling, or any inclined surface of any roughness, for that matter. To do so, the quadcopter must have a reasonable amount of forward velocity, to make a collision with the wall and give enough force for the microspines. To then take off the drone lets go of the contact between the surface and the microspine, and makes an oblique collision with it, to provide forward speed and stability.
This robot can also climb a wall just like a spider (or Spiderman for that matter), using a leg like structure and 'gecko adhesive'. This has been earlier tested but unlike other climbing drones which tend to fall down on the ground when it misses a step, SCAMP can automatically compute the misstep and activate propellers to stabilise it and avoiding it from losing much height. It can thus climb up the wall to reach the top and fly off in windy situations where a take off from the wall isn't possible.
Another interesting feature of the bot is that it ceases its props to save energy and focus on inputting data from the sensors to measure and analyse the environmental conditions of a rugged terrain, battlefield, or a disaster site. The climbing movement of SCAMP is still under development and also the landing on walls isn't fool proof like that on the ground just yet.
Source: #-Link-Snipped-#
The early inspiration to develop such a drone, specifically a quadcopter came upon pondering and scrutinising the fact that drones have a very limited battery life, which reduces the flight and overall usage time, making it less applicable to practical situations. The newly developed drone can, however, roost on any wall or ceiling of any inclination and height, instead of simply hovering around. This also helps the robot capture more stable pictures and videos of the sight, than a hovering drone. Moreover, it aids control of the drone in a rainy or windy situation, where an ordinary quadcopter would simply fail.
In order to perch on a wall, the robot uses what they call 'Microspines' which are hardened steel spikes on a special suspension, which are dragged along the same surface but in opposite direction to make a grip over an inclined surface. This is known as the opposed grip strategy. The spine gets attached to tiny microscopic bumps on a surface due to friction. This helps the quadcopter to perch not only on a wall, but also on a ceiling, or any inclined surface of any roughness, for that matter. To do so, the quadcopter must have a reasonable amount of forward velocity, to make a collision with the wall and give enough force for the microspines. To then take off the drone lets go of the contact between the surface and the microspine, and makes an oblique collision with it, to provide forward speed and stability.
This robot can also climb a wall just like a spider (or Spiderman for that matter), using a leg like structure and 'gecko adhesive'. This has been earlier tested but unlike other climbing drones which tend to fall down on the ground when it misses a step, SCAMP can automatically compute the misstep and activate propellers to stabilise it and avoiding it from losing much height. It can thus climb up the wall to reach the top and fly off in windy situations where a take off from the wall isn't possible.
Another interesting feature of the bot is that it ceases its props to save energy and focus on inputting data from the sensors to measure and analyse the environmental conditions of a rugged terrain, battlefield, or a disaster site. The climbing movement of SCAMP is still under development and also the landing on walls isn't fool proof like that on the ground just yet.
Source: #-Link-Snipped-#
0